 「Quince」は、地下街などでの大災害を想定して、地下空間を遠隔操作によってあちこち高速で走り回って、救助が必要な人を発見したり、災害状況の情報収集を行うロボットです。すでに仙台市の地下鉄と地下街を走行する実験を行っていて、また地下空間以外にも二次災害の恐れのある危険な建物内などに入って、内部の情報収集などに役立つよう開発しました(国際レスキューシステム研究機構、東北大学、千葉工業大学他の共同開発)。
「Quince」は、地下街などでの大災害を想定して、地下空間を遠隔操作によってあちこち高速で走り回って、救助が必要な人を発見したり、災害状況の情報収集を行うロボットです。すでに仙台市の地下鉄と地下街を走行する実験を行っていて、また地下空間以外にも二次災害の恐れのある危険な建物内などに入って、内部の情報収集などに役立つよう開発しました(国際レスキューシステム研究機構、東北大学、千葉工業大学他の共同開発)。
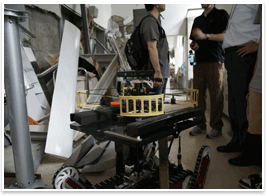
前モデルの「Kenaf」を引き継いだ、四輪を備えたクローラー型のロボットで、走行に大きな障害となるような瓦礫の散乱した場所でも踏破することができ、レスキューの現場で役立てるよう開発されているのが特徴です。特に走行性能と踏破性は、2007年のロボカップ世界大会(アトランタ)における「レスキューロボットリーグ」運動性能部門で優勝するなど(エントリー名「Pelican United」)、すでに広く認められています。
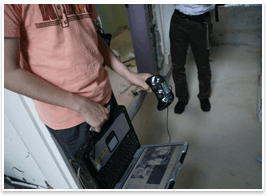 走行性の他にも、搭載したカメラでロボット周囲の環境を把握し、集めた情報を人間が視認できるように立体的に表示したり、地図を構築したりすることができます。また遠隔操作を行う際、ロボットが自分で本体の姿勢や踏破方法を計算して、人が指示した方向に進んでいくことができる「半自律操縦支援システム」なども特徴的な機能のひとつです。このほか本体に、目的に合わせたアームを取り付けることもできます。原子炉建屋内でのミッションについては、千葉工業大学の小柳栄次教授を中心にQuinceの改造を行い、目的に合わせたアームを使って、汚染水の深さの計測などの作業にチャレンジしました。それは、やっていてよかった、と思いますね。
走行性の他にも、搭載したカメラでロボット周囲の環境を把握し、集めた情報を人間が視認できるように立体的に表示したり、地図を構築したりすることができます。また遠隔操作を行う際、ロボットが自分で本体の姿勢や踏破方法を計算して、人が指示した方向に進んでいくことができる「半自律操縦支援システム」なども特徴的な機能のひとつです。このほか本体に、目的に合わせたアームを取り付けることもできます。原子炉建屋内でのミッションについては、千葉工業大学の小柳栄次教授を中心にQuinceの改造を行い、目的に合わせたアームを使って、汚染水の深さの計測などの作業にチャレンジしました。それは、やっていてよかった、と思いますね。